European
Southern
Observatory
Telescope
European
Southern
Observatory
The control system of the ELT allows the user to operate the telescope for science observations and maintenance activities.
It consists of computing hardware, sophisticated software, and communication infrastructure that bring together the many components of the ELT and ensure it is used in a safe and coordinated way.
It consists of computing hardware, sophisticated software, and communication infrastructure that bring together the many components of the ELT and ensure it is used in a safe and coordinated way.
The control system of the ELT allows the user to operate the telescope for science observations and maintenance activities.
It consists of computing hardware, sophisticated software, and communication infrastructure that bring together the many components of the ELT and ensure it is used in a safe and coordinated way.
The many advanced mechanical and optical components, or subsystems, of the ELT, are operated by means of a control system. This complex system integrates the various components of the telescope and works as the user interface to the ELT. It provides coordinated, safe operation of the subsystems as a single system to perform science observations and support engineering and maintenance activities.
The telescope control systems are also key in helping the ELT obtain sharp images. The complex primary mirror control system monitors and corrects the positions of its 798 segments, which are distorted by the effects of gravity and temperature, so it continues acting as one mirror. The M4 and M5 mirror control systems are important for compensating for distortions in the images caused by atmospheric turbulence and wind, an important part of the ELT’s adaptive optics.


Overall, the control system manages around 15000 actuators and over 25000 sensors distributed throughout the telescope and dome.
The communication infrastructure allows the majority of the computing units to be hosted in the computer room in the auxiliary building of the dome. This reduces vibration and heat pollution in the telescope area and provides a controlled data centre environment for the hardware.
The control system itself is a software-intensive system of systems. In designing such a system, decisions on algorithms and computational performance are not the only major problems. The organisation of the overall system, its behaviour and interactions present a complex challenge.
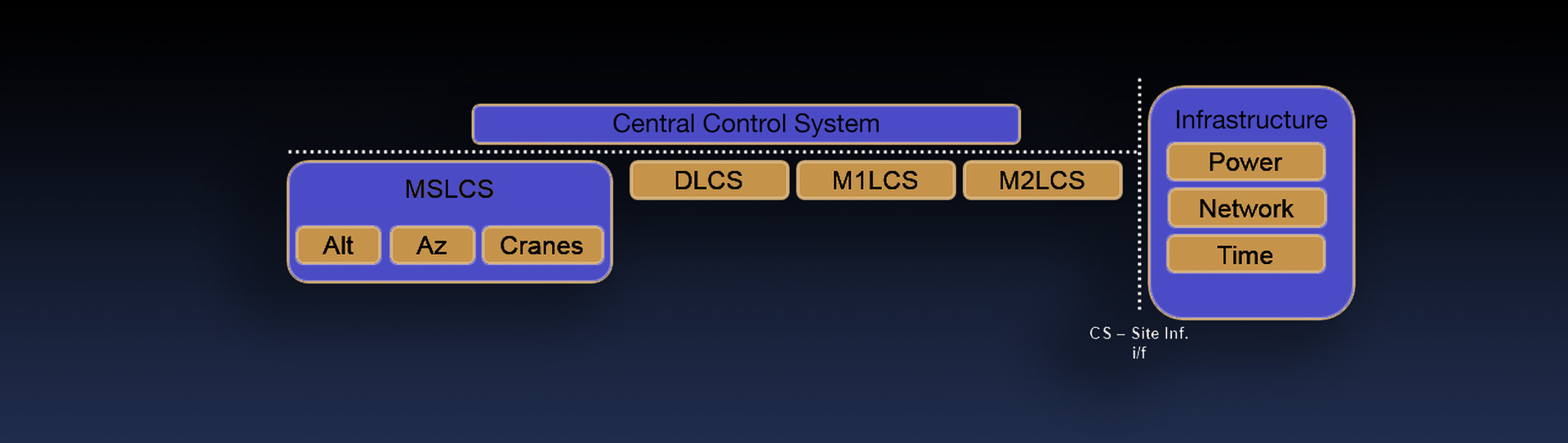
The control system is divided into two layers. The lower layer contains all the local control systems (LCSs), a set of control systems each managing performance and safety for a telescope subsystem. Examples include the LCS for the main structure, the dome, the primary mirror and the lasers, and so on.
The upper layer is a single system called the central control system (CCS), which is responsible for system level functions and safety. The many control loops, involving both electromechanical sensing and on-sky sensing, are combined and considered as an integrated control problem by the CCS (specifically the telescope realtime executor [TREx]).
The CCS provides the interface to the instrument control systems to carry out science observations. The instrument control system requests the CCS to acquire a celestial target, and the CCS decomposes the request into operations on individual subsystems: presetting the main structure to point to the target, rotating the dome, configuring the mirrors for best performance given the target location and presetting the guide probes to acquire the guide stars to further correct the telescope’s optical performance.
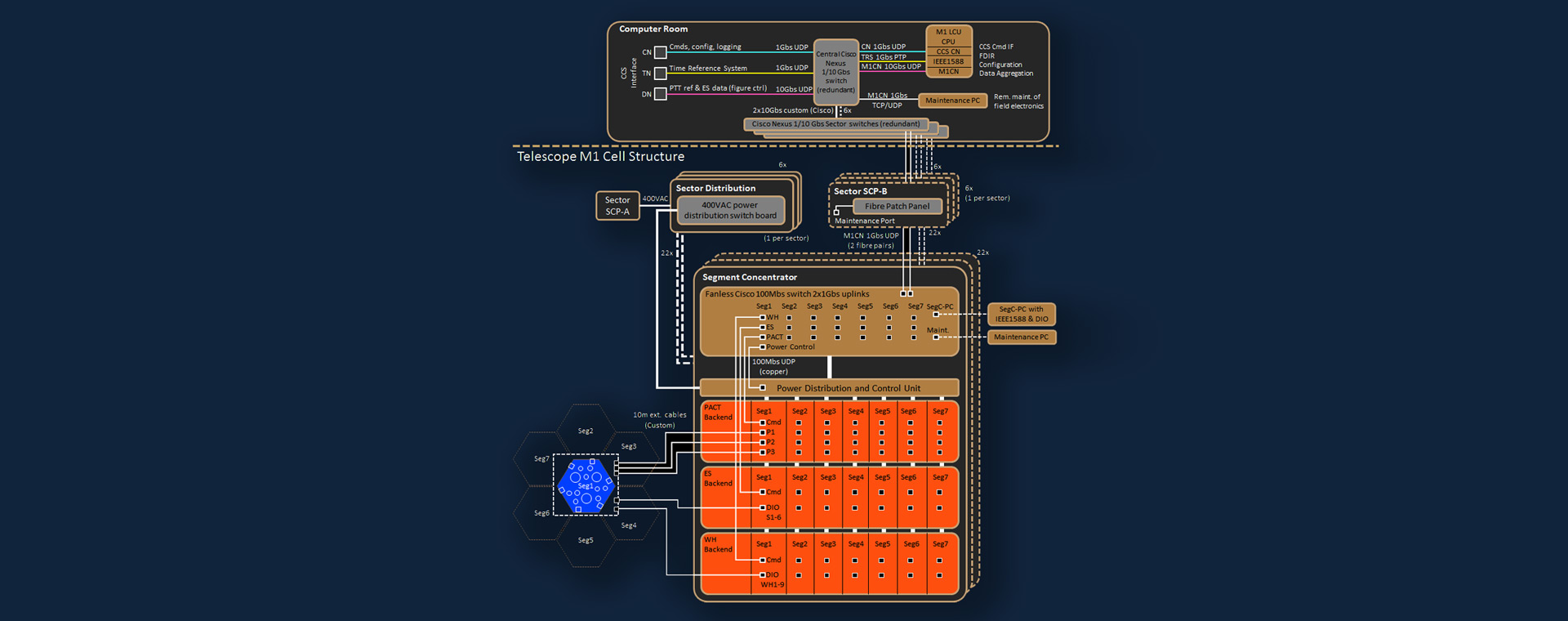
The primary mirror (M1) local control system is one of the most complex subsystems in the telescope. The M1 control system monitors more than 4500 edge sensors on the 798 mirror segments, which provide information on the relative displacement of adjacent segments. It then sends segment position corrections to the three mirror segment position actuators (PACTs) located under each segment. This control, monitoring and correcting at 500 Hz (500 times per second) actively maintains a continuous surface of the primary mirror to an error of around 50 nm. It also isolates the mirror segments from the cell’s back structure which deforms up to 5 mm under gravity, wind and changing thermal conditions. Further segment control is enabled through the M1 warping harness, a set of stepper motors and strain gauges, attached to each segment support structure, capable of controlling surface deformations in the individual segments.
The ELT quaternary mirror (M4) is a 2.4 m deformable mirror with over 5000 voice coil actuators providing a fast dynamic response. Its local control system maintains the mirror position through a closed-loop control. This mirror receives optical corrections from instrument and telescope adaptive optics modules at 1000 Hz and converts these modal amplitudes to actuator position commands. Movement of the actuators deforms the very thin M4 mirror, so its shape compensates for telescope aberrations and atmospheric turbulence, improving the image quality.
The next mirror in the light path, M5, is a flat, fast-steering (tip-tilt) mirror used to stabilise the image primarily against wind disturbance on the telescope. Its local control system maintains the mirror position responding to tip-tilt demands from the central control system. M4 and M5 form the core of the telescope’s adaptive optics.
During observation, the TREx, a component of the CCS, combines wavefront corrections and optical metrology from telescope guide probes and instrument-based sensors, with offload commands to achieve optimal stroke management in the telescope, i.e. maximising the travel-range of the actuators needed to adjust the ELT’s mirrors. By this, the fast-deformable mirror M4, which is continually adjusted to correct for the atmospheric disturbance seen by instrument sensors, has its full stroke arrange always available and optimised by offloading corrections to other (slower) mirror units and actuators in the telescope.
We use cookies that are essential for accessing our websites and using our services. We also use cookies to analyse, measure and improve our websites’ performance, to enable content sharing via social media and to display media content hosted on third-party platforms.
The European Organisation for Astronomical Research in the Southern Hemisphere (ESO) is the pre-eminent intergovernmental science and technology organisation in astronomy. It carries out an ambitious programme focused on the design, construction and operation of powerful ground-based observing facilities for astronomy.
This Cookies Policy is intended to provide clarity by outlining the cookies used on the ESO public websites, their functions, the options you have for controlling them, and the ways you can contact us for additional details.
Cookies are small pieces of data stored on your device by websites you visit. They serve various purposes, such as remembering login credentials and preferences and enhance your browsing experience.
Essential cookies (always active): These cookies are strictly necessary for the proper functioning of our website. Without these cookies, the website cannot operate correctly, and certain services, such as logging in or accessing secure areas, may not be available; because they are essential for the website’s operation, they cannot be disabled.
Functional Cookies: These cookies enhance your browsing experience by enabling additional features and personalization, such as remembering your preferences and settings. While not strictly necessary for the website to function, they improve usability and convenience; these cookies are only placed if you provide your consent.
Analytics cookies: These cookies collect information about how visitors interact with our website, such as which pages are visited most often and how users navigate the site. This data helps us improve website performance, optimize content, and enhance the user experience; these cookies are only placed if you provide your consent. We use the following analytics cookies.
Matomo Cookies:
This website uses Matomo (formerly Piwik), an open source software which enables the statistical analysis of website visits. Matomo uses cookies (text files) which are saved on your computer and which allow us to analyze how you use our website. The website user information generated by the cookies will only be saved on the servers of our IT Department. We use this information to analyze www.eso.org visits and to prepare reports on website activities. These data will not be disclosed to third parties.
On behalf of ESO, Matomo will use this information for the purpose of evaluating your use of the website, compiling reports on website activity and providing other services relating to website activity and internet usage.
Matomo cookies settings:
Additional Third-party cookies on ESO websites: some of our pages display content from external providers, e.g. YouTube.
Such third-party services are outside of ESO control and may, at any time, change their terms of service, use of cookies, etc.
YouTube: Some videos on the ESO website are embedded from ESO’s official YouTube channel. We have enabled YouTube’s privacy-enhanced mode, meaning that no cookies are set unless the user actively clicks on the video to play it. Additionally, in this mode, YouTube does not store any personally identifiable cookie data for embedded video playbacks. For more details, please refer to YouTube’s embedding videos information page.
Cookies can also be classified based on the following elements.
Regarding the domain, there are:
As for their duration, cookies can be:
Cookie settings: You can modify your cookie choices for the ESO webpages at any time by clicking on the link Cookie settings at the bottom of any page.
In your browser: If you wish to delete cookies or instruct your browser to delete or block cookies by default, please visit the help pages of your browser:
Please be aware that if you delete or decline cookies, certain functionalities of our website may be not be available and your browsing experience may be affected.
You can set most browsers to prevent any cookies being placed on your device, but you may then have to manually adjust some preferences every time you visit a site/page. And some services and functionalities may not work properly at all (e.g. profile logging-in, shop check out).
The ESO Cookies Policy may be subject to future updates, which will be made available on this page.
For any queries related to cookies, please contact: pdprATesoDOTorg.
As ESO public webpages are managed by our Department of Communication, your questions will be dealt with the support of the said Department.